🐠 Meet Gill - Gen3Sub 🐠
2025 - 2026
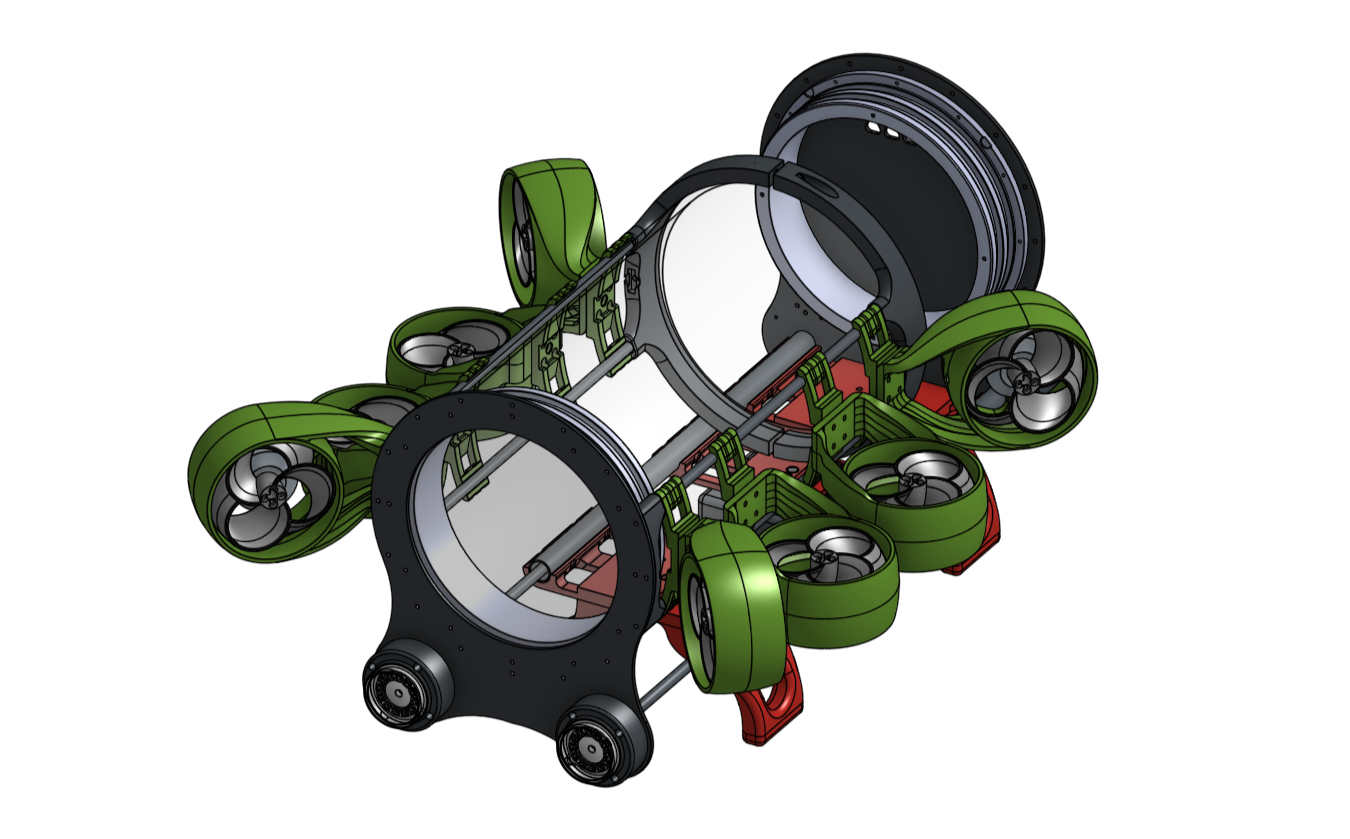
For RoboSub 2026, Stanford RoboSub is deploying two next-generation AUVs, Crush and Gill, featuring a completely overhauled, modular architecture. To maximize mission uptime, the mechanical design introduces a rapid-access sliding electronics chassis, while the electrical system utilizes a custom dual-battery management rail for hot-swappable power transitions. Driven by a fully agnostic ROS2 infrastructure, the software stack integrates a single-stage YOLOv8 perception pipeline with a dual-microcontroller acoustic architecture. To overcome underwater optical distortions, the team developed a synthetic data augmentation framework using JTA-GAN style transfer, ensuring robust perception generalization across a comprehensive, tiered testing cycle.
🐢 Meet Crush - Gen2Sub 🐢

2024 - 2025
Crush is Stanford RoboSub’s second-generation autonomous underwater vehicle, designed as both a RoboSub competition platform and a research-capable marine robotics system. Building on the lessons learned from our first vehicle, Dory, Crush was developed around four core priorities: reliability, modularity, data-driven iteration, and long-term usefulness beyond competition. The vehicle combines robust mechanical construction, improved onboard electronics, custom task mechanisms, and a modular ROS 2 software stack to support autonomous navigation, perception, manipulation, and environmental sensing.
🐟 Dory 🐟
2023-2024
Dory was Stanford RoboSub’s first autonomous underwater vehicle and the foundation of our team’s technical development. Built in just over five months after the team’s formation, Dory prioritized reliability, simplicity, and core autonomy capabilities. Rather than attempting every possible competition task, Dory was designed to perform a focused set of tasks well while giving future Stanford RoboSub teams a stable hardware and software platform to build upon.

